Датчики
| Õpikeskkond: | TalTech Moodle |
| Kursus: | Arukate süsteemide elementide projekteerimine ja väljatöötamine (Virumaa) |
| Raamat: | Датчики |
| Printija: | Külaliskasutaja |
| Kuupäev: | pühapäev, 26. juuli 2026, 10.31 AM |
1. LED
Светодиодный индикатор (LED)Устройства, называемые индикаторами, позволяют простому электронному прибору или сложному роботу общаться с человеком на языке примитивных сигналов. Существует множество различных по принципу действия индикаторов, которые преследуют одну цель сообщить человеку о состоянии системы. Так, например, индикатор питания монитора дает понять подключен ли последний к источнику энергии.
Самый простой индикатор, называется светоизлучающим диодом. Это
устройство, представляет собой полупроводниковый прибор, способный
излучать свет при пропускании через него электрического тока в прямом
направлении (от анода к катоду).
Для того чтобы правильно включить светодиод в электрическую цепь,
необходимо отличать катод от анода. Сделать это можно по двум
признакам:
1) Анод светодиода имеет более длинный проводник
2) Со стороны катода, корпус светодиода немного срезан
В современной микроэлектронике применяются миниатюрные светодиоды для поверхностного монтажа. Такие индикаторы, например, имеются на контроллере Raspberry PI для информирования пользователя о состоянии системы.Для правильной работы прибора, в цепь следует добавить ограничивающий резистор (220Ом-470Ом).

2. Инфракрасный датчик движения (PIR)
Датчики движения на основе
пироэлектрического эффекта (PIR, passive infrared motion sensor) часто используются в охранных системах и в
быту для обнаружения движения в помещении. Например, на
принципе детектирования движения основано автоматическое включение
света в подъезде.
Пироэлектрический сенсор позволяет фиксировать движение тёплых объектов: людей и животных. Подобные датчики используются на раздвижных дверях, открывающихся автоматически при приближении человека.
Выводом с сенсора является простой бинарный цифровой сигнал: пока движения нет сигнальный контакт установлен в логический ноль. Как только фиксируется движение, сигнальный контакт устанавливается в логическую единицу на небольшой промежуток времени.
1. Принцип работы пироэлектрических датчиков движения
{kind=link}
{kind=link}

Датчик движения - датчик в котором установлен пироэлектрический датчик. Сверху пироэлектрик окружен полусферой, разбитой на несколько сегментов. Каждый сегмент этой сферы представляет собой линзу, которая фокусирует тепловое излучение на разные участки ПИР-датчика. Часто в качестве линзы используют линзу Френеля.
Предположим, что датчик установлен в пустой комнате. Каждый чувствительный элемент получает постоянную дозу излучения, а значит и напряжение на них имеет постоянное значение (левый рисунок).

{kind=link}
Как только в комнату заходит человек, он попадает сначала в зону обзора первого элемента, что приводит к появлению положительного электрического импульса на нем (центральный рисунок).
Человек движется, и его тепловое излучение через линзы попадает уже на второй PIR-элемент, который генерирует отрицательный импульс. Электронная схема датчика движения регистрирует эти разнонаправленные импульсы и делает выводы о том, что в поле зрения датчика попал человек. На выходе датчика генерируется положительный импульс (правый рисунок).
Вот несколько ситуаций и мест, где может пригодиться датчик движения:
- автоматическое включение света в подъезде дома, в ванной комнате и туалете, перед входной дверью в помещение;
- сигнализация в помещении и во дворе;
- автоматическое открывание дверей;
- автоматическое включение охранной видеокамеры.
2. Характеристики HC-SR501
- Напряжение питания: 3–5 В
- Потребляемый ток: 50 мкА
- Угол наблюдения: 110°
- Расстояние наблюдения: до 7м
- Габариты: 28×36 мм
- Вес: 25 г
Настройка HC-SR501
У датчика HC-SR501 имеется два переменных резистора и перемычка для настройки режима. Один из потенциометров регулирует чувствительность прибора. Чем она больше, тем дальше «видит» датчик. Также чувствительность влияет на размер детектируемого объекта. К примеру, можно исключить из срабатывания собаку или кошку.

Второй потенциометр регулирует время срабатывания T. Если датчик обнаружил движение, он генерирует на выходе положительный импульс длиной T.
Наконец, третий элемент управления — перемычка, которая переключает режим датчика. В положении L датчик ведет отсчет Т от самого первого срабатывания. Допустим, мы хотим управлять светом в ванной комнате. Зайдя в комнату, человек вызовет срабатывание датчика, и свет включится ровно на время Т. По окончании периода, сигнал на выходе вернется в исходное состояние, и датчик будет ждать следующего срабатывания.
В положении H датчик начинает отсчет времени T каждый раз после обнаружения движения. Другими словами, любое шевеление человека вызовет обнуление таймера отсчета Т. По-умолчанию, перемычка находится в состоянии H.
3. Зуммер (buzzer)
Зуммер (buzzer)
Обычно, для звуковой индикации используется специальный прибор, называемый зуммером. Зуммер представляет собой устройство, которое генерирует звуковую волну определенной частоты. В основе работы большинства зуммеров лежит пьезоэлектрический эффект, поэтому такие приборы называются пьезоэлектрическими звукоизлучателями.

Для того чтобы заставить зуммер
издавать звук, достаточно установить на соответствующем контакте высокий
уровень сигнала. Но чтобы получить разные тона (разные частоты звука), необходимо
воспользоваться функцией,
которая позволяет изменять частоту звучания зуммера.
Зуммер пассивный (buzzer)

Обозначение контактов
Техническая спецификация зуммера KY-012:
- Min/Max Operating Voltage +3.3V to +5V
- Maximum Current: 30mA
- Resonance Frequency: 2500Hz ± 300Hz continous
- Minimum Sound Output 85Db @ 4in (10cm)
- Storage Temperature: -22°F to 221°F (-30°C to 105°C)
- Operating Temperature: -4°F to 158°F (-20°C to 70°C)
- Dimensions: 0.73in X 0.59in (18.5mm X 15mm)
4. Тактовая кнопка
Тактовая кнопка



Эффект дребезга

Схема подключения

Схема с подтягивающим резистором

- Есть нажатие: Vout = 0
- Нет нажатия: Vout = Vcc
Схема со стягивающим резистором

- Есть нажатие: Vout = Vcc
- Нет нажатия: Vout = 0
Источник
5. DHT22
Датчик температуры и влажности DHT22
Обзор датчика температуры и влажности DHT22
Датчик DHT22 (или AM2302) — это модуль измерения температуры и влажности.
Примеры использования:
- Автоматическое управление вентиляцией в тепличных хозяйствах
- Метеостанции
- Система «умного дома» и контроля климата
- Автоматическое охлаждение помещений

Технические параметры
Модель: DHT22
Напряжение питания: 3В … 5В
Максимально потребляемый ток - 2.5мА при преобразовании
(при запросе данных).
Выходной сигнал: цифровой
Чувствительный элемент: полимерный конденсатор
Диапазон измерения температуры: -40°С … +125°С, погрешность
±0.5°С
Диапазон измерения влажности: 0 … 100%, погрешность ±2%
Задержка: 2с
Размеры: 15.1 мм x 25.1 мм x 7.7 мм

- Питание (VCC) - от 3.3 до 6 В.
- Вывод данных.
- Не подключается.
- Земля.
Между 1 и 2 выводами необходимо подключить резистор на 10 кОм
Источник6. HC-SR04
Ультразвуковой датчик расстояния
Ультразвуковой датчик расстояния (дальномер) - это устройство для измерения расстояния до некоторого предмета.


Технические характеристики HC-SR04
| Напряжение питания | +5В – постоянный ток |
| Сила тока покоя | < 2 мА |
| Рабочая сила тока | 15 мА |
| Эффективный рабочий угол | < 15° |
| Расстояние измерений | от 2 см до 400 см (1 – 13 дюймов) |
| Разрешающая способность | 0.3 см |
| Угол измерений | 30 градусов |
| Ширина импульса триггера | 10 микросекунд |
| Размеры | 45 мм x 20 мм x 15 мм |
Пины:
| VCC | +5 вольт (постоянный ток) - положительный контакт питания |
| Trig | Триггер (INPUT) - цифровой вход. Для запуска измерения необходимо подать на этот вход логическую единицу на 10 микросекунд. Следующее измерение рекомендуется выполнять не ранее чем через 50 мс. |
| Echo | Эхо (OUTPUT) - цифровой выход. После завершения измерения, на этот выход будет подана логическая единица на время, пропорциональное расстоянию до объекта. |
| GND | Земля - отрицательный контакт питания |

Калькуляция
Необходимо создать импульс на Trig для начала измерения, и замерить длину импульса на Echo, чтобы потом вычислить дистанцию.
Так как время, затрачиваемое импульсом, на самом деле является движением ультразвуковых сигналов туда и обратно, в то время как нам нужна только половина этого. Поэтому время берется время / 2.
Расстояние = Скорость * Время / 2
Скорость звука = 343 м / с или 34300 см / с. Таким образом,
Расстояние = 17150 * Время (единица измерения)
7. SG-90
Сервопривод SG-90
Сервопривод
- это мотор-редуктор, способный поворачивать выходной вал в заданное
положение (на заданный угол) и удерживать его в этом положении, вопреки
сопротивлениям.

Общее устройство и принцип работы
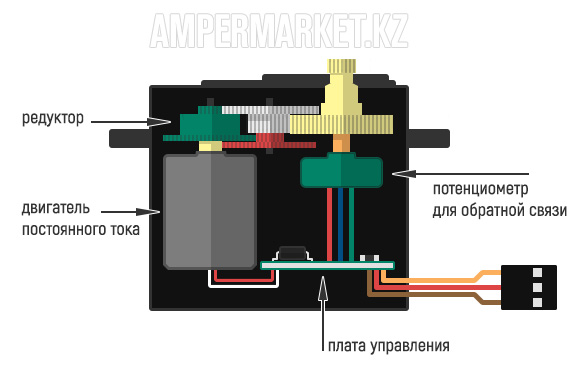
Важным моментом здесь является то, что длительность импульсов обратной связи регулируется встроенным потенциометром, положение вала которого устанавливается валом двигателя через зубчатую передачу: куда вал двигателя, туда и ручка потенциометра. Таким образом за любом движением вала двигателя последует изменение длины импульсов сигала обратной связи. Эта сцепка и образует обратную связь. Увидеть ее можно на схеме устройства серводвигателя выше.
Направление вращения вала двигателя задается полярностью напряжения сигнала.
Основные характеристики сервоприводов
Тип сервопривода: аналоговые и цифровые
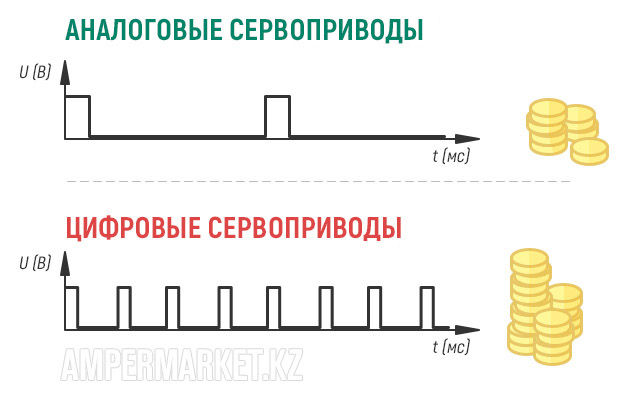
Большинство аналоговых моделей, в силу особенностей устройства плат их управления, способны принимать и обрабатывать управляющие импульсы с частотой 50 Гц, то есть каждые 20 мс. Как следствие и сигналы на двигатель тоже отправляются каждые 20 мс. Это значит, что чем ближе вал к своему «пункту назначения», заданному управляющим ШИМ сигналом, тем слабее сигнал, посылаемый на двигатель, ведь длина его импульсов сокращается по мере приближения к заданной позиции. Поэтому при малых отклонениях двигатель уже не может развивать большой момент силы. Кроме того нельзя забывать про наличие у сервоприводов «мертвых зон».
В цифровых сервоприводах эти недостатки в значительной степени устраняются доработкой платы управления, а именно – применением специальных микроконтроллеров. Данное техническое решение позволяет увеличить частоту сигналов до 200 Гц и более. В результате сервопривод становится более шустрым: быстрее реагирует на внешние воздействия и развивает необходимый крутящий момент, мертвые зоны становятся намного короче.
Цифровые сервоприводы решают проблемы, связанные с низкой частотой сигналов, но вместе с тем становятся сложнее в производстве, а потому – дороже. Кроме того они потребляют больше энергии, чем аналоговые.
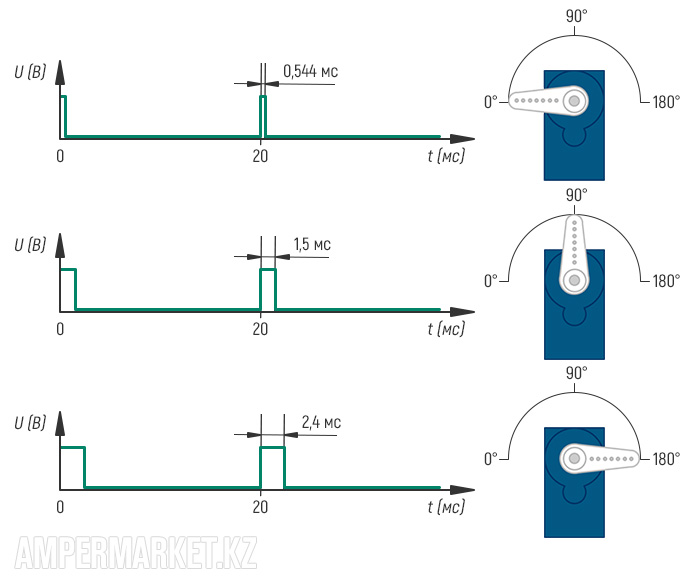
Угол поворота
Момент силы (крутящий момент)
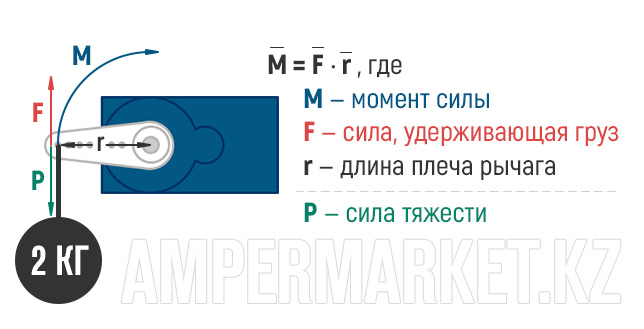
Более строгая формулировка звучит следующим образом: момент силы есть векторная физическая величина, равная векторному произведению вектора силы и радиус-вектора, проведённого от оси вращения к точке приложения этой силы. Характеризует вращательное действие силы на твёрдое тело.
Единица измерения данной величины в системе СИ — ньютон-метр [Н∙м], но на практике часто можно встретить другую единицу — килограмм-силы-сантиметр [кгс∙см]. Также кгс∙см часто записывают как кг∙см.
1 кгс∙см ≈ 0,098 Н∙м.
Скорость
Стоит отметить, что обычно более скоростные приводы имеют меньший момент силы, и наоборот – более мощные серводвигатели крутятся медленнее, чем менее мощные.
Мертвая зона
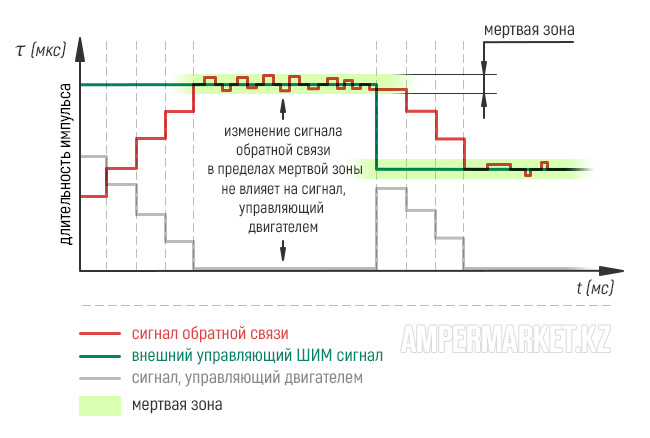
Обычно «ширина» мертвой зоны указывается в микросекундах. Например, наличие мертвой зоны в 4 мкс говорит о том, что всякая разность импульсов управляющего сигнала и сигнала обратной связи короче 4 мкс будет игнорироваться платой управления и не будет приводить к генерации сигнала управления двигателем.
Спецификация SG-90:
| Вес серво | 9 грамм |
| Размеры | 21.5мм X 11.8мм X 22.7мм |
| Напряжение питания | 4,8 ... 6 В |
| Момент (усилие) | 1.2 кг*см при напряжении 4,7В |
| Время поворота на 60° | 0,12 сек. при напряжении 4,7В |
| Рабочая температура | -30°C … +60°C |
| Длина кабеля | 23 см |
| Материал шестерней | Нейлон |
| Механика | Аналоговая |
| Dead-set | 7 мкс |
Подключение к контроллеру Arduino:
- Pin Brown = connect to - / GND
- Pin Orange = connect to +5V
- Pin Yellow = in this example connect to Digital port
8. DS18B20
| Диапазон измеряемых температур | −55…+125 °C |
|---|---|
| Точность | ±0,5°C (в пределах −10…+85 °C) |
| Время получения данных | 750 мс при 12-битном разрешении; 94 мс при 9-битном разрешении |
| Напряжение питания | 3–5,5 В |
| Потребляемый ток при бездействии | 750 нА |
| Потребляемый ток при опросе | 1 мА |

Подключение
Герметичный датчик на основе микросхемы DS18B20 можно подключить двумя способами:
- По трём проводам: питание (красный), земля (чёрный) и сигнал (белый).
- По двум проводам: земля и сигнал. В этом случае датчик изредка может давать неверные показания, которые легко исключить из конечного результата фильтрацией.
Независимо от способа подключения, сигнальный провод необходимо соединить с питанием через резистор 4,7 кОм. При подключении только одного датчика, подойдёт и резистор на 10 кОм.
Для подключения датчика к контроллеру или к макетной плате удобно будет использовать нажимной клеммник.
Характеристики
- Диапазон измеряемых температур: −55…+125 °C
- Точность: ±0,5°C (в пределах −10…+85 °C)
- Время получения данных: 750 мс при 12-битном разрешении; 94 мс при 9-битном разрешении
- Напряжение питания: 3–5,5 В
- Потребляемый ток при бездействии: 750 нА
- Потребляемый ток при опросе: 1 мА

Датчик работает от 3,0 до 5,0 В, что означает, что он может питаться напрямую от 3,3 В от одного из контактов Raspberry (1 или 17).
Датчик имеет 3 провода:
- Черный: GND
- Красный: VCC
- Желтый: 1-проводные данные
Здесь вы можете найти полные данные:DS18B20 Datasheet
9. Датчик влажности почвы
Компактный простой датчик влажности почвы (гигрометр), состоящий из двух частей: электродной пары и платы, обрабатывающей сигнал. Методика замера влажности основывается на способности влажной почвы проводить электрический ток. Чем выше влажность, тем выше проводимость. Для получений искомых значений необходимо погрузить электроды во влажную почву и измерить протекающий ток. При работе с датчиком не стоит забывать о неизбежной электролитической каррозии электродов. Из-за негативного ее влияния на датчик, включать его рекомендуется только на время измерений.
Для снятия показаний датчик имеет аналоговый и цифровой выходы. Пороговое значение для цифрового выхода настраивается подстроечным резистором.
Контактная группа модуля:
- VCC – «+» питания
- GND – «земля», «-» питания
- + – контакт для подключения электродов
- – – контакт для подключения электродов
- DO – цифровой выход
- AO – аналоговый выход.
Датчик влажности почвы

- Рабочее напряжение: 3,3 — 5 В
- Максимальная глубина погружения в почву: 40 мм
- Максимальный потребляемый ток: 50 мА
- Используется стабильный LM393 чип
- Панель PCB
- Размер: 3х1,5 см
- Размер сенсора (зонда): 6х3 см
- Длина кабеля: 21 см
- Описание
интерфейса (4 контакта):
-VCC: 3.3V-5V
-GND: GND
-DO: цифровой выходной интерфейс (0 и 1)
-АО: аналоговый выходной интерфейс - Два режим выхода: аналоговый и цифровой
- Индикатор питания (красный) и индикатор цифрового выхода (зеленый)
- Построен на компараторе LM393
| Чувствительность | настраивается потенциометром |
|---|---|
| Напряжение питания | 3,3—5 В |
| Размер платы управления | 3 см × 1,6 см |
| Компаратор | LM393 |
| Интерфейс | цифровой (DO) и аналоговый (AO) |
10. Вентилятор
Вентилятор
